FW10010032 - Výzkum a vývoj autonomního monitorovacího systému v reálném čase
Název projektu
Výzkum a vývoj autonomního monitorovacího systému v reálném čase
Řešitelé projektu
Realizace projektu: 01/2024 - 12/2025
Abstrakt projektu
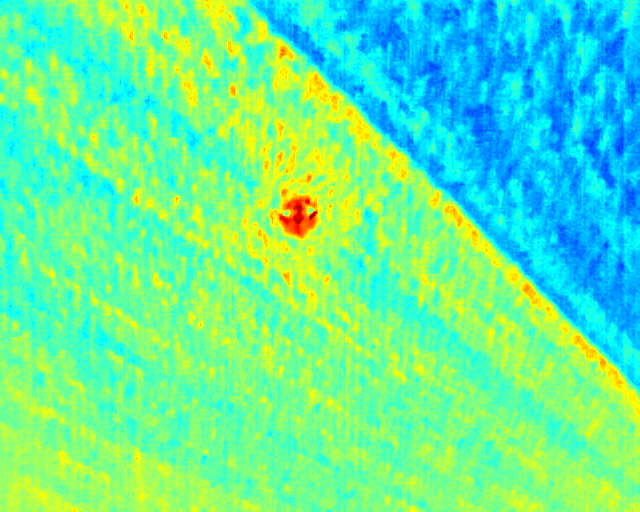
Cílem projektu je vyvinout, vyrobit a otestovat systém autonomního výstražného monitoringu v reálném časem zaměřeného na prostředí skládek a deponií energetických a odpadních surovin. Činnosti VaV budou zaměřeny na vhodný princip detekce ohnisek zahoření, princip autonomního fungování jednotek v reálném čase a v různých ročních obdobích, komunikaci s okolím a vyhodnocení možných řešení. Dané zařízení bude navázáno na bezpečnostní složky, bude komunikovat s vybranými subjekty skrze SMS a bude propojeno s návaznou činností skrze dron, který potvrdí ohnisko požáru (GPS) a návazně ve vyšších specifikacích může zahájit lokální hašení. Dané zařízení má rozličné celosvětové využití, které řešitelský tým specifikuje na rozlehlé skládky energetických surovin.
Výstupy projektu:
Fuzit - Užitný vzor
Zařízení pro detekci ohnisek požáru, v rámci vymezené sledované oblasti, vyznačující se tím, že sestává ze stacionárních monitorovací zařízení ze skupiny kamery a laserové dálkoměry a termokamery vybavené senzory a dále z mobilních jednotek provedených jako drony vybavené stabilizačním závěsem a systémem videopřenosu, které jsou uspořádány ve stacionárních nabíjecích zařízeních uspořádaných mimo sledovanou oblast, přičemž systém dále obsahuje ovládací prvek pozemní stanice propojený se senzory kamer, termokamer a mobilních jednotek.
Gprot - Prototyp
Prototyp je koncipován jako autonomní stacionární jednotka umístěná na 6 m ocelovém stožáru. Konstrukce je vybavena ocelovým rozvaděčem, který obsahuje prvky napájení a bateriové zálohy. Energetickou nezávislost na distribuční síti zajišťuje fotovoltaický panel v kombinaci s větrnou turbínou. Tyto zdroje přes MPPT regulátory trvale dobíjejí záložní akumulátor o kapacitě 150 Ah. Jednotlivé okruhy pro DC napájení jsou řešeny dvěma DC/DC měniči umístěnými v rozvaděči a určenými pro napájení kamery a ovládacího mini PC. Mezi kamerou a ovládacím PC je protažen ethernetový kabel pro trvalou komunikaci a zajištění odolnosti proti rušení okolního prostředí. Kamera je připojena na napájení pomocí druhého kabelu a nevyužívá se možnosti POE napájení opět z důvodu odolnosti. Oba kabely jsou protažené vnitřkem trubkového rámu pro zamezení poškození venkovními vlivy. Komunikace s nadřazeným systémem dronu probíhá formou JSON zpráv, které obsahují GPS souřadnice stožáru a absolutní směr vyvolaného teplotního alarmu.
Zajímavosti: